Abstract
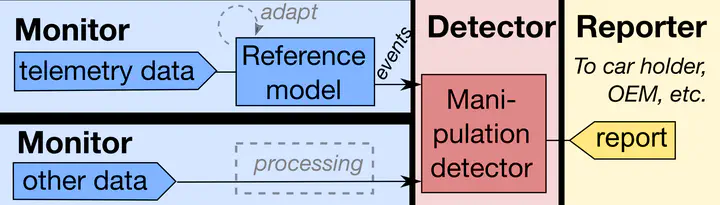
This paper describes a method and framework to detect manipulations in automotive control systems. As the automotive industry is shifting towards employing software-based solutions, the incentives for attackers to manipulate automotive systems. The boundary where the cyber and physical world interface is particularly sensitive for security and safety. Manipulations in the computer system might have an uncontrollable impact in the physical environment and could lead to potentially dangerous situations. This paper presents a context-aware intrusion detection system (CAID) framework capable to recognize manipulations of the physical system using cyber means. CAID uses sensor information to establish reference models of the physical system and then checks correctness of current sensor data against the reference models. Thereby, it establishes the notion of plausibility of a controller’s operation. CAID augments today’s cyber physical intrusion detection systems (IDS) by adding a physical model to the detection engine. The CAID framework has been evaluated in a vehicular setup using test vehicle. Telemetry data has been collected from a test vehicle that has then been chip-tuned with a commercially available chip-tuning tool to obtain manipulated data. CAID was able to recognize the chip tuning with a very high probability using an unsupervised Artificial Neural Network (ANN). This proof-of-concept could be the starting point to enhance current automotive IDS using the CAID framework in order to detect future automotive attacks to safety-critical systems.